学习stm32 pwm 基础内容示例说明led 控制_stm32的pwm例程-程序员宅基地
学习stm32 pwm 控制舵机,首先要了解pwm 的原理和工作模式,详情请参考stm32 中文参考手册。本次着重说明一下通用定时器,因为下面程序会使用到通用定时器。已经定时器与pwm 的使用,这次介绍内容比较多,舵机控制接着下一个,这次就led 灯的pwm 操作。
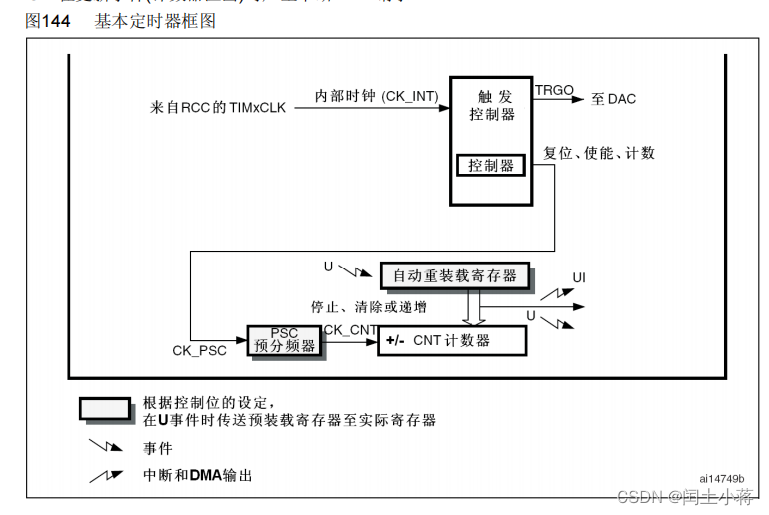
基本定时器(TIM6和TIM7)
基本定时器TIM6和TIM7各包含一个16位自动装载计数器,由各自的可编程预分频器驱动。它们可以作为通用定时器提供时间基准,特别地可以为数模转换器(DAC)提供时钟。实际上,它们在芯片内部直接连接到DAC并通过触发输出直接驱动DAC。 这2个定时器是互相独立的,不共享任何资源。
下面是基本定时器框图
高级控制定时器
高级控制定时器(TIM1和TIM8)由一个16位的自动装载计数器组成,它由一个可编程的预分频器驱动。
它适合多种用途,包含测量输入信号的脉冲宽度(输入捕获),或者产生输出波形(输出比较、PWM、嵌入死区时间的互补PWM等)。
使用定时器预分频器和RCC时钟控制预分频器,可以实现脉冲宽度和波形周期从几个微秒到几个毫秒的调节。
高级控制定时器(TIM1和TIM8)和通用定时器(TIMx)是完全独立的,它们不共享任何资源。它们可以同步操作,具体描述参看13.3.20节。
下面是高级定时器框图
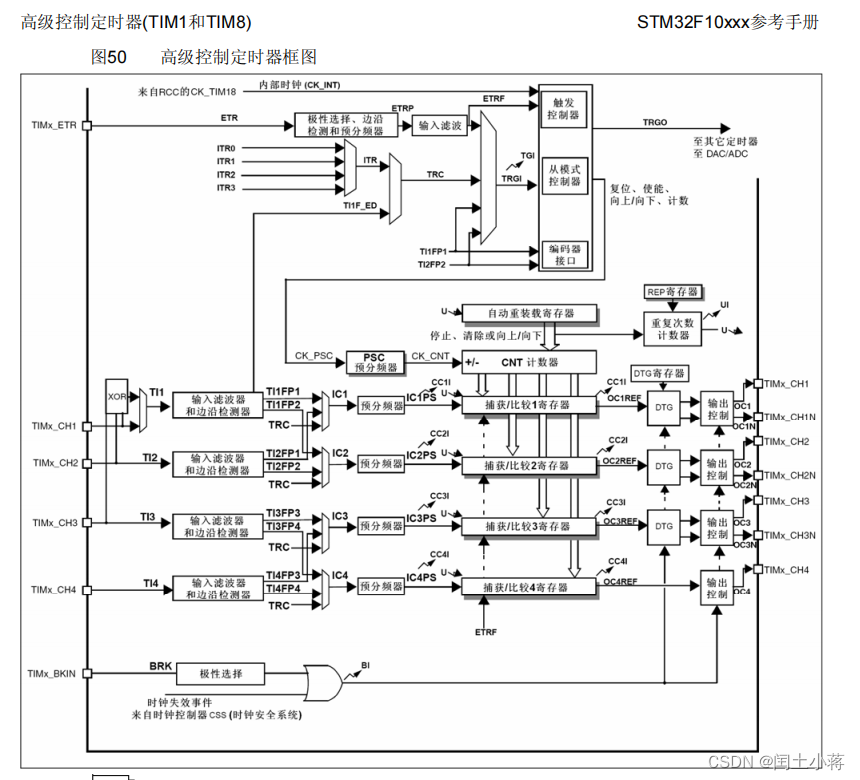
- TIM1和TIM8
- 时基单元包含
● 计数器寄存器(TIMx_CNT)
● 预分频器寄存器 (TIMx_PSC)
● 自动装载寄存器 (TIMx_ARR)
● 重复次数寄存器 (TIMx_RCR)
、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
通用定时器(TIMx)
通用定时器是一个通过可编程预分频器驱动的16位自动装载计数器构成。
它适用于多种场合,包括测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和PWM)。
使用定时器预分频器和RCC时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。
每个定时器都是完全独立的,没有互相共享任何资源。
- TIM2、TIM3、TIM4和TIM5
下图是通用定时器的框图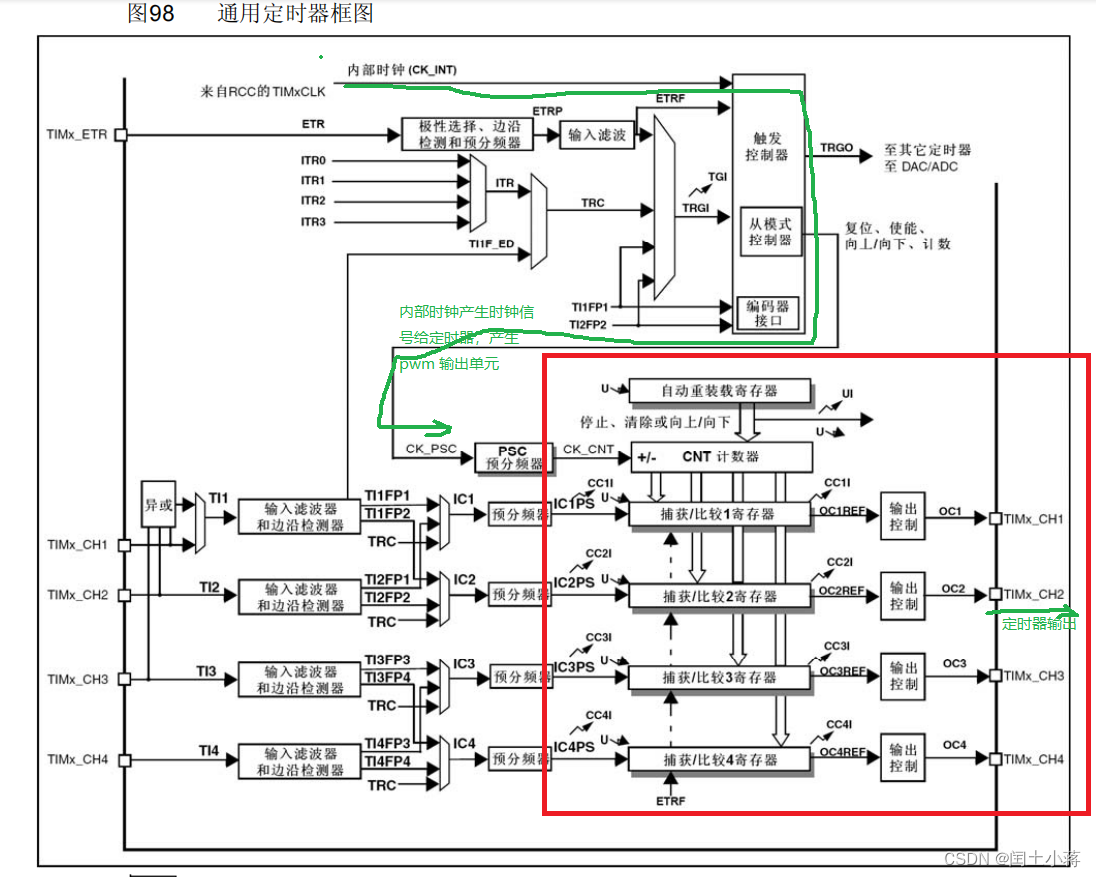
由上图所知pwm的时钟来源于内部时钟,通过定时器产生pwm 输出单元。
可编程通用定时器的主要部分是一个16位计数器和与其相关的自动装载寄存器。
这个计数器可以向上计数、向下计数或者向上向下双向计数。此计数器时钟由预分频器分频得到。
计数器、自动装载寄存器和预分频器寄存器可以由软件读写,在计数器运行时仍可以读写。
时基单元包含:
- 计数器寄存器(TIMx_CNT)
计数器由预分频器的时钟输出CK_CNT驱动,仅当设置了计数器TIMx_CR1寄存器中的计数器使能位(CEN)时,CK_CNT才有效。(有关计数器使能的细节,请参见控制器的从模式描述)。
注:真正的计数器使能信号CNT_EN是在CEN的一个时钟周期后被设置。 - 预分频器寄存器 (TIMx_PSC)
预分频器可以将计数器的时钟频率按1到65536之间的任意值分频。它是基于一个(在TIMx_PSC寄存器中的)16位寄存器控制的16位计数器。这个控制寄存器带有缓冲器,它能够在工作时被改变。 - 自动装载寄存器 (TIMx_ARR)
自动装载寄存器是预先装载的,写或读自动重装载寄存器将访问预装载寄存器。根据在TIMx_CR1寄存器中的自动装载预装载使能位(ARPE)的设置,预装载寄存器的内容被立即或在每次的更新事件UEV时传送到影子寄存器。当计数器达到溢出条件(向下计数时的下溢条件)并当TIMx_CR1寄存器中的UDIS位等于’0’时,产生更新事件。更新事件也可以由软件产生。
计数器模式
- 向上计数模式
在向上计数模式中,计数器从0计数到自动加载值(TIMx_ARR计数器的内容),然后重新从0开始
计数并且产生一个计数器溢出事件。
每次计数器溢出时可以产生更新事件,在TIMx_EGR寄存器中(通过软件方式或者使用从模式控
制器)设置UG位也同样可以产生一个更新事件。 - 向下计数模式
在向下模式中,计数器从自动装入的值(TIMx_ARR计数器的值)开始向下计数到0,然后从自动
装入的值重新开始并且产生一个计数器向下溢出事件。
每次计数器溢出时可以产生更新事件,在TIMx_EGR寄存器中(通过软件方式或者使用从模式控
制器)设置UG位,也同样可以产生一个更新事件。 - 中央对齐模式(向上/向下计数)
在中央对齐模式,计数器从0开始计数到自动加载的值(TIMx_ARR寄存器)−1,产生一个计数器
溢出事件,然后向下计数到1并且产生一个计数器下溢事件;然后再从0开始重新计数。
在这个模式,不能写入TIMx_CR1中的DIR方向位。它由硬件更新并指示当前的计数方向
时钟选择
- 内部时钟(CK_INT)
- 外部时钟模式1:外部输入脚(TIx)
- 外部时钟模式2:外部触发输入(ETR)
- 内部触发输入(ITRx):使用一个定时器作为另一个定时器的预分频器,如可以配置一个定时
器Timer1而作为另一个定时器Timer2的预分频器。
PWM模式
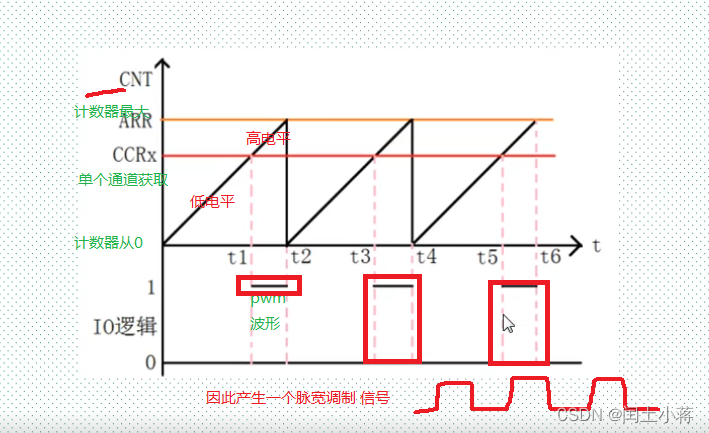
脉冲宽度调制模式可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的信号。
在TIMx_CCMRx寄存器中的OCxM位写入’110’(PWM模式1)或’111’(PWM模式2),能够独立地设置每个OCx输出通道产生一路PWM。必须设置TIMx_CCMRx寄存器OCxPE位以使能相应的预装载寄存器,最后还要设置TIMx_CR1寄存器的ARPE位,(在向上计数或中心对称模式中)使能自动重装载的预装载寄存器。
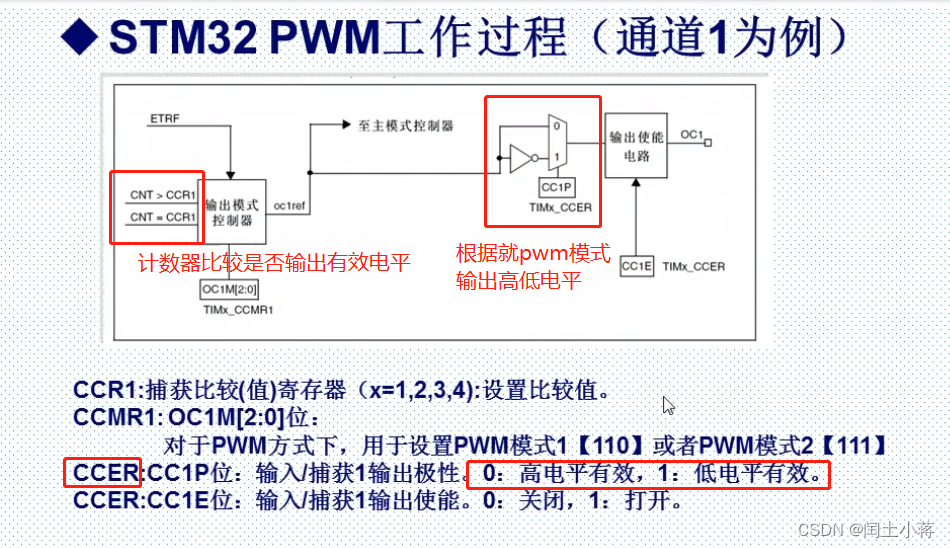
PWM模式1和PWM模式2
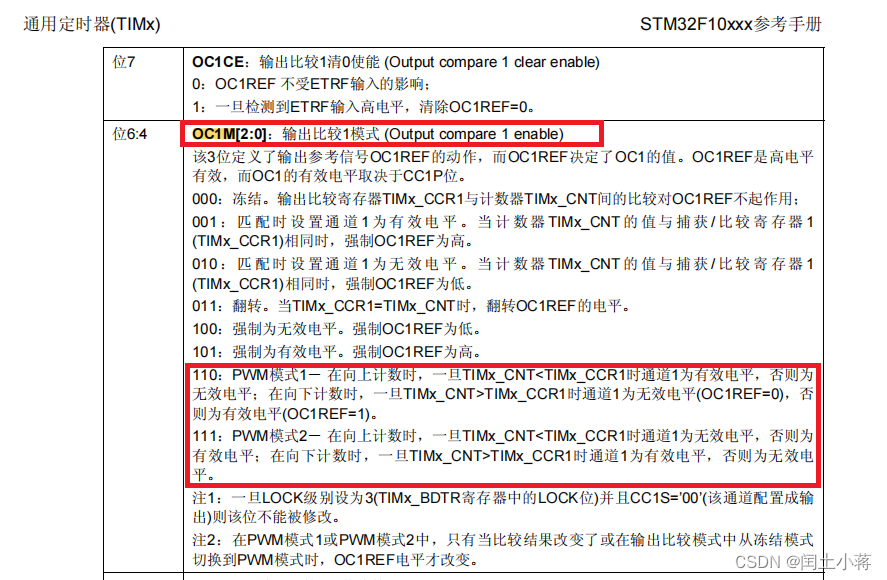
110:PWM模式1- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为
无效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平(OC1REF=0),否
则为有效电平(OC1REF=1)。
111:PWM模式2- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为
有效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为无效电
平。
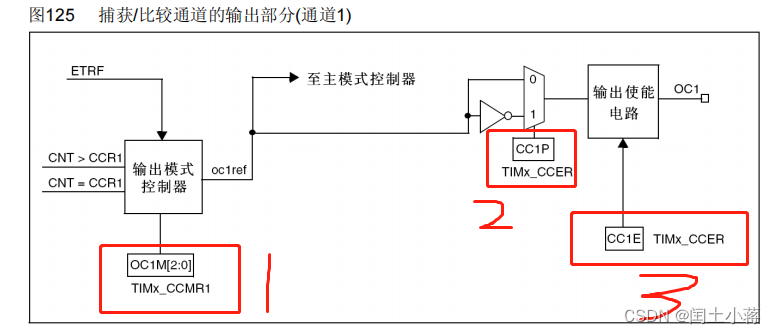
(捕获/比较使能寄存器TIMx_CCER, 参考中文手册14.4.9 )
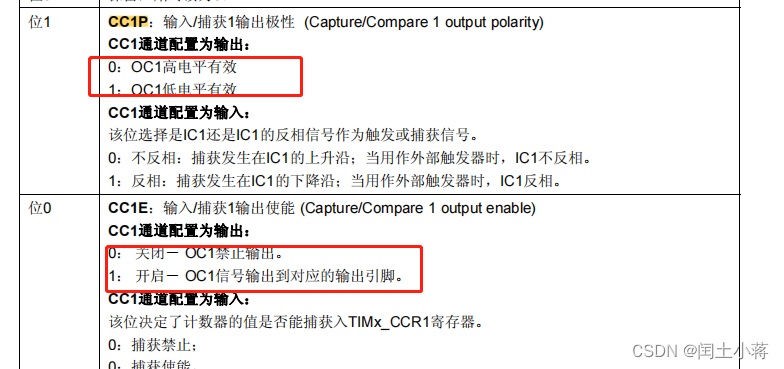
理解:
第一步:TIMx_CNT<TIMx_CCR1 (捕获寄存器值)均为有效电平
第二步:CC1P 设置 0高电平,1低电平
比较是否有效+设置高低电平=我们需要的pwm
pwm 工作过程
如上图所示:通过捕获寄存器,获取计数器的数值,把计数器的值和CCRx进行比较 判断输出高低电平,从而产生一个pwm 波形输出。
ARR :信号周期,
CCRx :捕获比较寄存器的值(决定占空比)
由上图所看:通过计数器去比较CCR1 进入CC1 去控制高低电平的输出,大于CCR输出高电平,小于输出低电平。
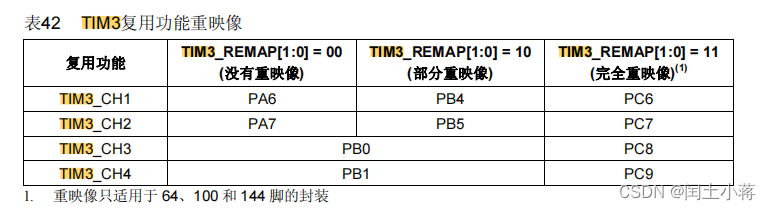
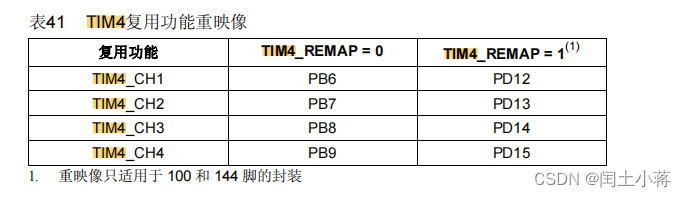
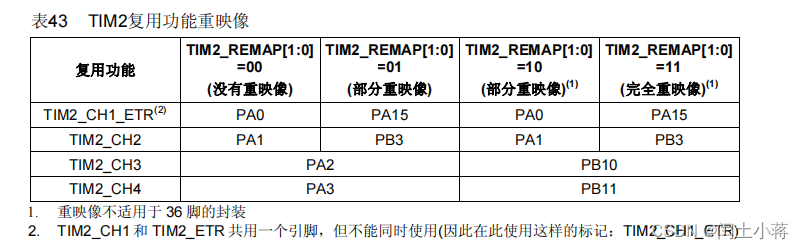
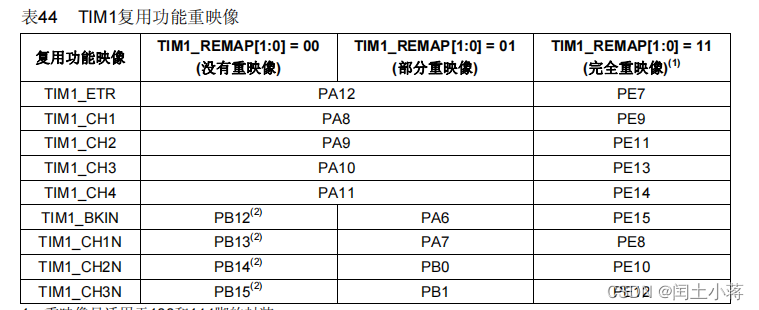
通用计时器通道
使用定时器,需查看手册,对应的io口使调用对应的定时器
列举如下图通道对应的引脚 (具体参考中文手册 8.3.7 定时器复用功能重映射)

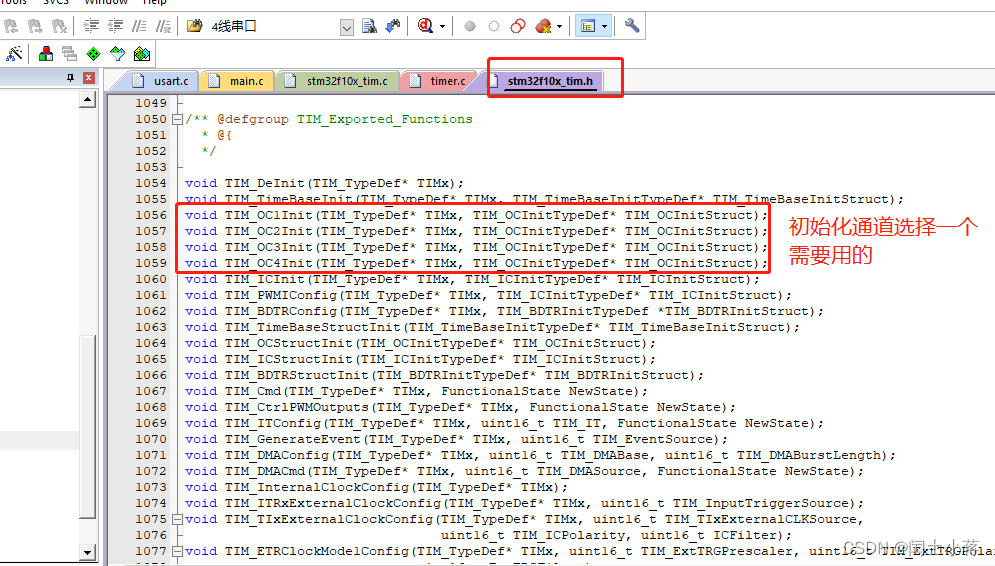
项目应用(库函数)
第一步骤引入 stm32f10x_tim.c 文件
按照上图所示我们需要设置这3个模块的函数
结构体指针类型
typedef struct
{
uint16_t TIM_OCMode; /*!< 指定TIM模式。该参数可以是@ref TIM_Output_Compare_and_PWM_modes的值,模式1,模式2 */
uint16_t TIM_OutputState; /*!< 指定TIM输出比较状态。该参数可以是@ref TIM_Output_Compare_state的值 是否输出使能IO口*/
uint16_t TIM_OutputNState; /*!< TIM互补输出比较状态。该参数可以是@ref TIM_Output_Compare_N_state的值@note该参数仅对TIM1和TIM8有效*/
uint16_t TIM_Pulse; /*!< 指定要加载到捕获比较寄存器的脉冲值。该参数可以是一个介于0x0000和0xFFFF之间的数字CCRx ,CCR1,CCR2,CCR */
uint16_t TIM_OCPolarity; /*!< 该参数可以是@ref tim_output_compare_极性的值 */
uint16_t TIM_OCNPolarity; /*!< 指定互补输出极性。该参数可以是@ref tim_output_compare_n_极性的值
@note该参数仅对TIM1和TIM8有效。*/
uint16_t TIM_OCIdleState; /*!< Idle状态下TIM Output Compare引脚状态。该参数可以是@ref TIM_Output_Compare_Idle_State的值@note该参数仅对TIM1和TIM8有效. */
uint16_t TIM_OCNIdleState; /*!< Idle状态下TIM Output Compare引脚状态。该参数可以是@ref TIM_Output_Compare_N_Idle_State的值@note该参数仅对TIM1和TIM8有效. */
} TIM_OCInitTypeDef;
示例
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
使用定时器,需查看手册,对应的io口使调用对应的定时器上面已经把通用定时器对应的引脚和映射引脚说明
使用定时器,需查看手册,对应的io口使调用对应的定时器上面已经把通用定时器对应的引脚和映射引脚说明了
使用定时器,需查看手册,对应的io口使调用对应的定时器上面已经把通用定时器对应的引脚和映射引脚说明了
使用定时器,需查看手册,对应的io口使调用对应的定时器上面已经把通用定时器对应的引脚和映射引脚说明了
单片机使用的是stm32f103 zet6 设置led 灯的熄灭
- 通用定时器3中断初始化
- 定时器x中断服务程序
- TIMx PWM部分初始化
源码参考于 正点原子-ALIENTEK战舰STM32开发板,实验9 PWM输出实验
tim3.c
#include "timer.h"
#include "led.h"
#include "usart.h"
//
//1,增加TIM3_PWM_Init函数。
//2,增加LED0_PWM_VAL宏定义,控制TIM3_CH2脉宽
//
//通用定时器3中断初始化
//这里时钟选择为APB1的2倍,而APB1为36M
//arr:自动重装值。
//psc:时钟预分频数
//这里使用的是定时器3!
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIMx外设
}
//定时器3中断服务程序
void TIM3_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
LED1=!LED1;
}
}
//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
tim3.h
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
void TIM3_Int_Init(u16 arr,u16 psc);
void TIM3_PWM_Init(u16 arr,u16 psc);
#endif
主函数的应用
#include "timer.h"
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
TIM3_PWM_Init(899,0); //不分频。PWM频率=72000000/900=80Khz
while(1)
{
delay_ms(10);
if(dir)led0pwmval++;
else led0pwmval--;
if(led0pwmval>300)dir=0;
if(led0pwmval==0)dir=1;
TIM_SetCompare2(TIM3,led0pwmval);
}
}
智能推荐
【新手科研指南5】深度学习代码怎么读-小白阶段性思路(以手写数字识别应用为例)_深度学习程序怎么读-程序员宅基地
文章浏览阅读6.2k次,点赞6次,收藏26次。我是一个深度学习代码小白,请你用中文写上注释,能让我能轻松理解下面这段代码。注意包含所有函数、调用和参数的注释。以同样的python代码块样式返回你写的代码给我。代码看累了,就看《动手学深度学习》文档:基于PyTorch框架,从底层函数实现基础功能,再到框架的高级功能。努力上路的小白一枚,麻烦路过的大佬指导一二,同时希望能和大家交流学习~争取更新学习这个文档的专栏,记录学习过程。量身定做了一套话术hhh,亲身测试还不错。这个感觉更浅一点儿,之后复习看吧。20天吃掉那只Pytorch。_深度学习程序怎么读
Java学习路线图,看这一篇就够了!-程序员宅基地
文章浏览阅读2.7w次,点赞126次,收藏1.2k次。耗废1024根秀发,Java学习路线图来了,整合了自己所学的所有技术整理出来的2022最新版Java学习路线图,适合于初、中级别的Java程序员。_java学习路线
PCL_Tutorial2-1.7-点云保存PNG_pcl::io:savepng-程序员宅基地
文章浏览阅读4.4k次。1.7-savingPNG介绍代码详情函数详解savePNGFile()源码savePNGFile()源码提示savePNGFile()推荐用法处理结果代码链接介绍PCL提供了将点云的值保存到PNG图像文件的可能性。这只能用有有序的云来完成,因为结果图像的行和列将与云中的行和列完全对应。例如,如果您从类似Kinect或Xtion的传感器中获取了点云,则可以使用它来检索与该云匹配的640x480 RGB图像。代码详情#include <pcl / io / pcd_io.h>#incl_pcl::io:savepng
知乎问答:程序员在咖啡店编程,喝什么咖啡容易吸引妹纸?-程序员宅基地
文章浏览阅读936次。吸引妹子的关键点不在于喝什么咖啡,主要在于竖立哪种男性人设。能把人设在几分钟内快速固定下来,也就不愁吸引对口的妹子了。我有几个备选方案,仅供参考。1. 运动型男生左手单手俯卧撑,右手在键盘上敲代码。你雄壮的腰腹肌肉群活灵活现,简直就是移动的春药。2.幽默男生花 20 块找一个托(最好是老同学 or 同事)坐你对面。每当你侃侃而谈,他便满面涨红、放声大笑、不能自已。他笑的越弱_咖啡厅写代码
【笔试面试】腾讯WXG 面委会面复盘总结 --一次深刻的教训_腾讯面委会面试是什么-程序员宅基地
文章浏览阅读1.2w次,点赞5次,收藏5次。今天 (应该是昨天了,昨晚太晚了没发出去)下午参加了腾讯WXG的面委会面试。前面在牛客上搜索了面委会相关的面经普遍反映面委会较难,因为都是微信的核心大佬,问的问题也会比较深。昨晚还蛮紧张的,晚上都没睡好。面试使用的是腾讯会议,时间到了面试官准时进入会议。照例是简单的自我介绍,然后是几个常见的基础问题:例如数据库索引,什么时候索引会失效、设计模式等。这部分比较普通,问的也不是很多,不再赘述。现在回想下,大部分还是简历上写的技能点。接下来面试官让打开项目的代码,对着代码讲解思路。我笔记本上没有这部分代码,所_腾讯面委会面试是什么
AI绘画自动生成器:艺术创作的新浪潮-程序员宅基地
文章浏览阅读382次,点赞3次,收藏4次。AI绘画自动生成器是一种利用人工智能技术,特别是深度学习算法,来自动创建视觉艺术作品的软件工具。这些工具通常基于神经网络模型,如生成对抗网络(GANs),通过学习大量的图像数据来生成新的图像。AI绘画自动生成器作为艺术与科技结合的产物,正在开启艺术创作的新篇章。它们不仅为艺术家和设计师提供了新的工具,也为普通用户提供了探索艺术的机会。随着技术的不断进步,我们可以预见,AI绘画自动生成器将在未来的创意产业中发挥越来越重要的作用。
随便推点
Flutter ListView ListView.build ListView.separated_flutter listview.separated和listview.builder-程序员宅基地
文章浏览阅读1.7k次。理解为ListView 的三种形式吧ListView 默认构造但是这种方式创建的列表存在一个问题:对于那些长列表或者需要较昂贵渲染开销的子组件,即使还没有出现在屏幕中但仍然会被ListView所创建,这将是一项较大的开销,使用不当可能引起性能问题甚至卡顿直接返回的是每一行的Widget,相当于ios的row。行高按Widget(cell)高设置ListView.build 就和io..._flutter listview.separated和listview.builder
2021 最新前端面试题及答案-程序员宅基地
文章浏览阅读1.4k次,点赞4次,收藏14次。废话不多说直接上干货1.js运行机制JavaScript单线程,任务需要排队执行同步任务进入主线程排队,异步任务进入事件队列排队等待被推入主线程执行定时器的延迟时间为0并不是立刻执行,只是代表相比于其他定时器更早的被执行以宏任务和微任务进一步理解js执行机制整段代码作为宏任务开始执行,执行过程中宏任务和微任务进入相应的队列中整段代码执行结束,看微任务队列中是否有任务等待执行,如果有则执行所有的微任务,直到微任务队列中的任务执行完毕,如果没有则继续执行新的宏任务执行新的宏任务,凡是在..._前端面试
linux基本概述-程序员宅基地
文章浏览阅读1k次。(3)若没有查到,则将请求发给根域DNS服务器,并依序从根域查找顶级域,由顶级查找二级域,二级域查找三级,直至找到要解析的地址或名字,即向客户机所在网络的DNS服务器发出应答信息,DNS服务器收到应答后现在缓存中存储,然后,将解析结果发给客户机。(3)若没有查到,则将请求发给根域DNS服务器,并依序从根域查找顶级域,由顶级查找二级域,二级域查找三级,直至找到要解析的地址或名字,即向客户机所在网络的DNS服务器发出应答信息,DNS服务器收到应答后现在缓存中存储,然后,将解析结果发给客户机。_linux
JavaScript学习手册十三:HTML DOM——文档元素的操作(一)_javascript学习手册十三:html dom——文档元素的操作(一)-程序员宅基地
文章浏览阅读7.9k次,点赞26次,收藏66次。HTML DOM——文档元素的操作1、通过id获取文档元素任务描述相关知识什么是DOM文档元素节点树通过id获取文档元素代码文件2、通过类名获取文档元素任务描述相关知识通过类名获取文档元素代码文件3、通过标签名获取文档元素任务描述相关知识通过标签名获取文档元素获取标签内部的子元素代码文件4、html5中获取元素的方法一任务描述相关知识css选择器querySelector的用法代码文件5、html5中获取元素的方法二任务描述相关知识querySelectorAll的用法代码文件6、节点树上的操作任务描述相关_javascript学习手册十三:html dom——文档元素的操作(一)
《LeetCode刷题》172. 阶乘后的零(java篇)_java 给定一个整数n,返回n!结果尾数中零的数量-程序员宅基地
文章浏览阅读132次。《LeetCode学习》172. 阶乘后的零(java篇)_java 给定一个整数n,返回n!结果尾数中零的数量
php 公众号消息提醒,如何开启公众号消息提醒功能-程序员宅基地
文章浏览阅读426次。请注意,本文将要给大家分享的并不是开启公众号的安全操作风险提醒,而是当公众号粉丝给公众号发消息的时候,公众号的管理员和运营者如何能在手机上立即收到消息通知,以及在手机上回复粉丝消息。第一步:授权1、在微信中点击右上角+,然后选择“添加朋友”,然后选择“公众号”,然后输入“微小助”并关注该公众号。2、进入微小助公众号,然后点击底部菜单【新增授权】,如下图所示:3、然后会打开一个温馨提示页面。请一定要..._php微信公众号服务提示