蓝桥杯单片机温度传感器DS18B20(基于STC15F2K60S2)_stc15f2k60s2单片机读取ds18b20温度检测-程序员宅基地

可以看到,温度传感器DS18B20接在P14上并进行了上拉
sbit DQ=P1^4;我们通过单总线端口对温度传感器进行控制,步骤如下:

需要注意的是,通过单线总线的所有执行(处理)都从一个初始化序列开始。也就是说所有的操作前都需要初始化一次。
那么先要进行初始化:
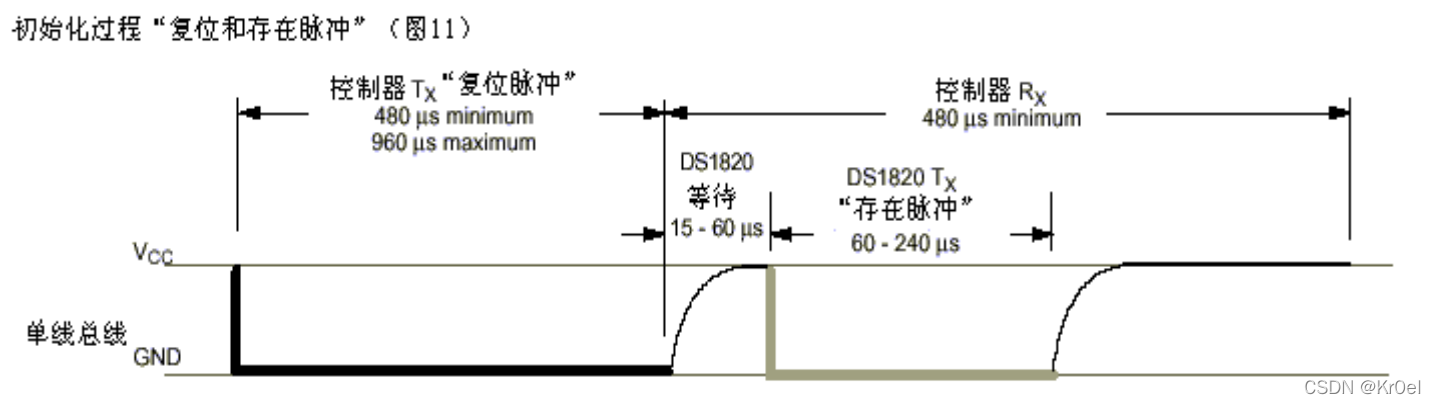
根据时序图可以看出,我们需要先拉低,等待480us再拉高,接下来传感器自己拉低,控制完成
void Init_DS18B20(void)//传感器初始化
{
DQ=0;
Delay500us();
DQ=1;
Delay500us();
}初始化完成之后,就可以开始操作了
这时候我们需要用到ROM指令,主要用到三种:忽略、温度转换和读暂存器
第一种:忽略ROM指令

常规来讲,我们需要进行ROM识别来确定到自己想用的外设,但是P14上只有一个温度传感器,所以不需要识别,直接忽略即可
DS18B20_WriteByte(0XCC);第二种:温度转换指令

Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0X44);第三种:读暂存器指令

在暂存器前需要进行初始化
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0XBE);读数据的过程:
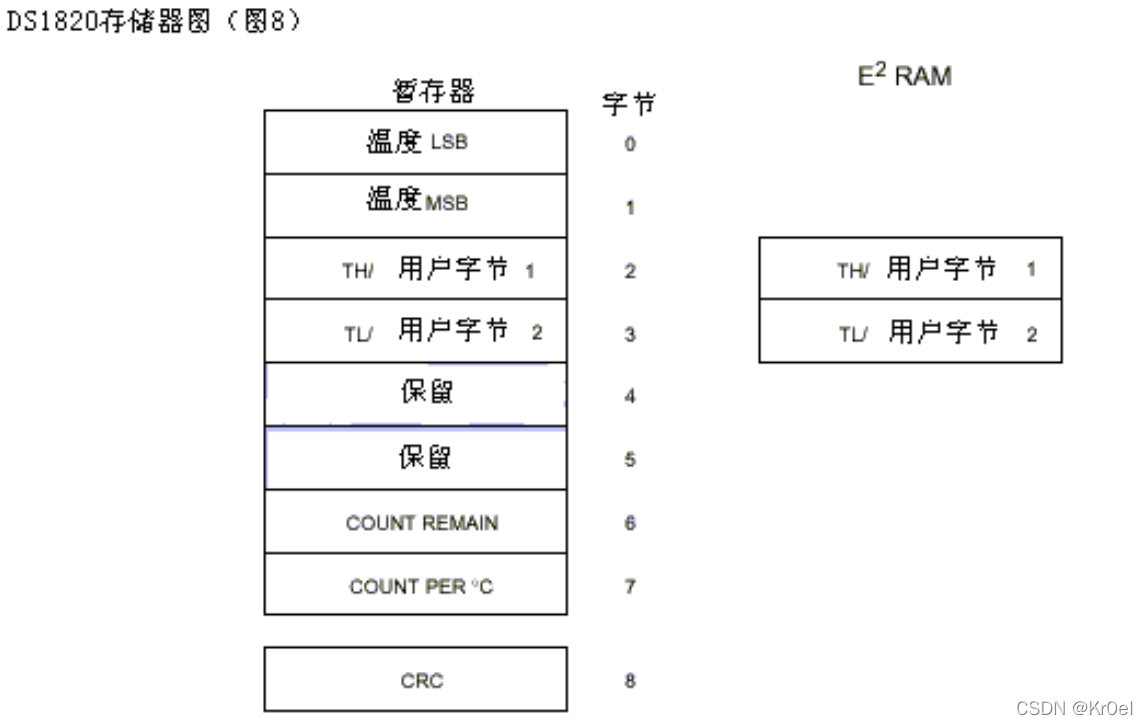
从上到下依次进行读,我们只需要第一、二次读的温度低八位和高八位就够了
low=DS18B20_ReadByte();//第一次读低八位(byte0)
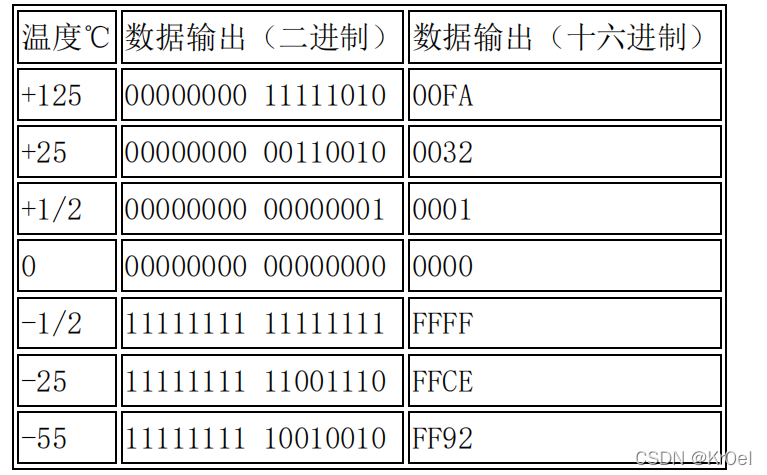
high=DS18B20_ReadByte();//第二次读高八位(byte1)温度/数据关系:
读写时序
这里注意所有的数据和指令的传递都是从最低有效位开始
写时序:
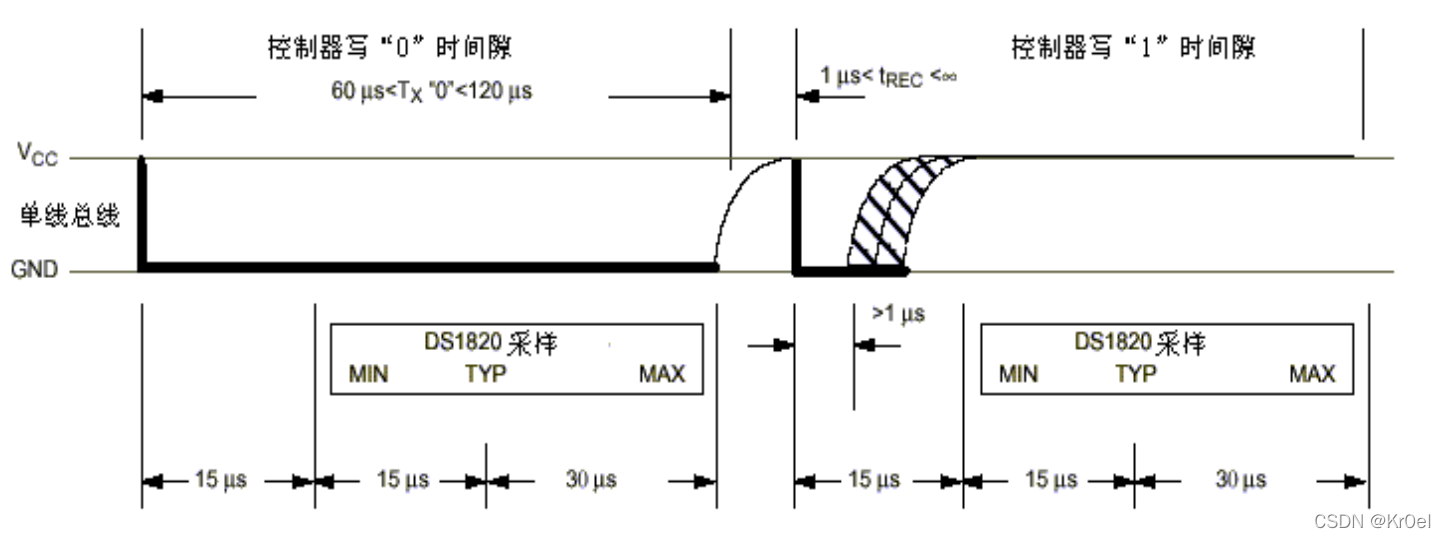
先拉低,保持15us后DS18B20开始采集,此时若为低电平则DS18B20得到0,高电平则为1,总时长至少保持60us(从拉低到采集完)
void DS18B20_WriteByte(u8 dat)
{
u8 j;
for(j=0;j<8;j++)
{
DQ=0;
DQ=dat&0X01;//判断最后一位是高电平还是低电平
Delay80us();//最低60us
dat>>=1;//移位准备进行下一位的传输
DQ=1;
}
}读时序:
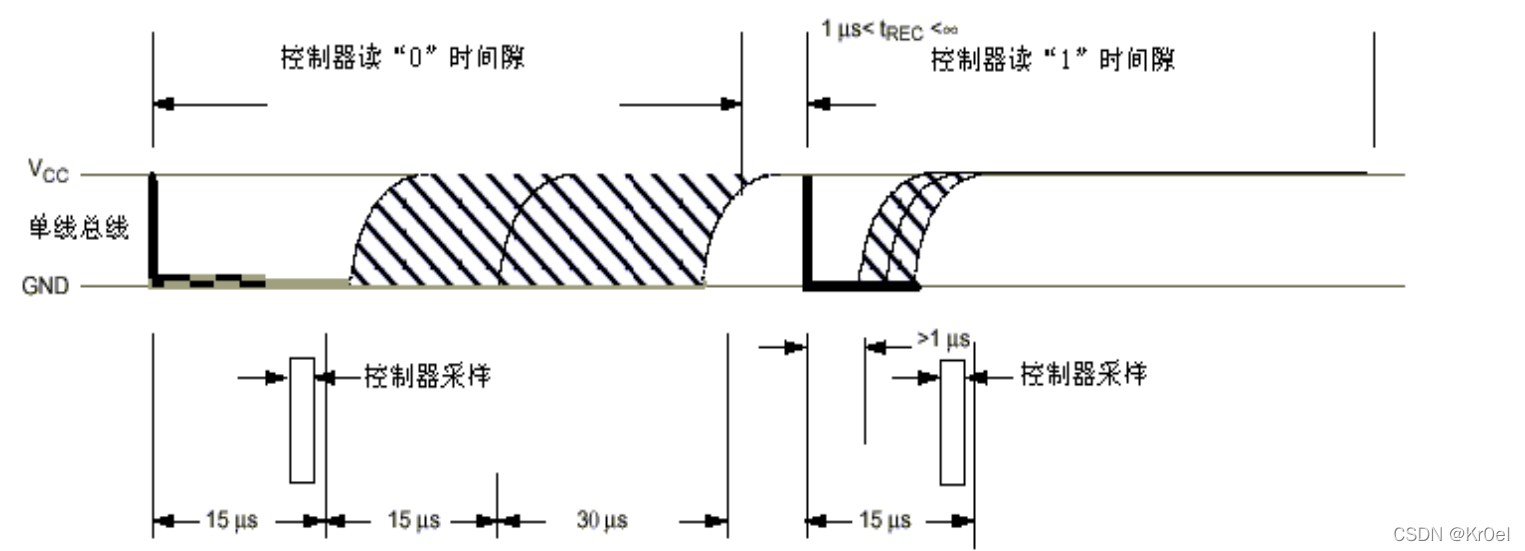
先拉低,采样后拉高,然后根据DS18B20自身为0或1来读0或1
u8 DS18B20_ReadByte()
{
u8 i;
u8 dat=0;
for(i=0;i<8;i++)
{
DQ=0;
dat>>=1;
DQ=1;
if(DQ==1)
{
dat|=0X80;
}
Delay80us();
}
return dat;
}整理读到的数据:
低八位的后四位是小数点,高八位的前四位是正负表示,不需要的话需要清除
temp=high<<4;
temp=temp|(low>>4);如果需要读小数点的话:
temp=high&0x0f;//不显示正负
temp<<=8;
temp=temp|low;
temp=temp*625;//精度为0.0625最后整体代码
#include <STC15F2K60S2.H>
#include<intrins.h>
#define u8 unsigned char
#define u16 unsigned int
u8 yi,er,san,si,wu,liu,qi,ba;
u8 tab[]={0XC0,0XF9,0XA4,0XB0,0X99,0X92,0X82,0XF8,0X80,0X90,0XFF};
sbit DQ=P1^4;
u8 num,temper,tt;
void Allinit(void);
void DS18B20_WriteByte(u8 dat);
u8 TemperGet();
void Init_DS18B20(void);
void Delay500us(void);
void Delay80us();
void Delay100us(void);
u8 DS18B20_ReadByte();
void Display1(u8 yi,u8 er);
void Display2(u8 san,u8 si);
void Display3(u8 wu,u8 liu);
void Display4(u8 qi,u8 ba);
void Delay(u8 ms);
void main()
{
yi=10;er=10;san=10;si=10;wu=10;liu=10;qi=10;ba=10;
Allinit();
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0X44);
while(1)
{
if(++tt==120)//隔一段时间进行显示
{
tt=0;
temper=TemperGet();
yi=temper/10;er=temper%10;
}
Display1(yi,er);
Display2(san,si);
Display3(wu,liu);
Display4(qi,ba);
}
}
u8 DS18B20_ReadByte()
{
u8 i;
u8 dat=0;
for(i=0;i<8;i++)
{
DQ=0;
dat>>=1;
DQ=1;
if(DQ==1)
{
dat|=0X80;
}
Delay80us();
}
return dat;
}
void DS18B20_WriteByte(u8 dat)
{
u8 j;
for(j=0;j<8;j++)
{
DQ=0;
DQ=dat&0X01;//判断最后一位是高电平还是低电平
Delay80us();//最低60us
dat>>=1;//移位准备进行下一位的传输
DQ=1;
}
}
u8 TemperGet()//开始工作
{
u8 low,high,temp;
Init_DS18B20();
DS18B20_WriteByte(0XCC);
DS18B20_WriteByte(0X44);
Delay500us();
Init_DS18B20();
DS18B20_WriteByte(0XCC);//进行下一个流程
DS18B20_WriteByte(0XBE);
low=DS18B20_ReadByte();
high=DS18B20_ReadByte();
temp=high<<4;
temp=temp|(low>>4);
return temp;
}
void Allinit(void)
{
P2=0X80;P0=0XFF;//LED灯
P2=0XA0;P0=0X00;//蜂鸣器,继电器
P2=0XC0;P0=0XFF;//数码管位选
P2=0XE0;P0=0XFF;//数码管全关闭
}
void Delatems(int ms)
{
int i,j;
for(i=0;i<ms;i++)
for(j=0;j<845;j++);
}
void Delay500us(void) //@11.0592MHz
{
unsigned char i, j;
_nop_();
_nop_();
i = 6;
j = 93;
do
{
while (--j);
} while (--i);
}
void Delay80us() //@11.0592MHz
{
unsigned char i;
_nop_();
_nop_();
_nop_();
i = 218;
while (--i);
}
void Init_DS18B20(void)//传感器初始化
{
DQ=0;
Delay500us();
DQ=1;
Delay500us();
}
void Display1(u8 yi,u8 er)
{
P2=0XC0;
P0=0X01;
P2=0XE0;
P0=tab[yi];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X02;
P2=0XE0;
P0=tab[er];
Delay(100);
P0=0XFF;
Delay(150);
}
void Display2(u8 san,u8 si)
{
P2=0XC0;
P0=0X04;
P2=0XE0;
P0=tab[san];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X08;
P2=0XE0;
P0=tab[si];
Delay(100);
P0=0XFF;
Delay(150);
}
void Display3(u8 wu,u8 liu)
{
P2=0XC0;
P0=0X10;
P2=0XE0;
P0=tab[wu];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X20;
P2=0XE0;
P0=tab[liu];
Delay(100);
P0=0XFF;
Delay(150);
}
void Display4(u8 qi,u8 ba)
{
P2=0XC0;
P0=0X40;
P2=0XE0;
P0=tab[qi];
Delay(100);
P0=0XFF;
Delay(150);
P2=0XC0;
P0=0X80;
P2=0XE0;
P0=tab[ba];
Delay(100);
P0=0XFF;
Delay(150);
}
void Delay(u8 ms) //1毫秒@11.0592MHz
{
u8 i;
for(i=0;i<ms;i++)
{
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0xCD; //设置定时初始值
TH0 = 0xD4; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
}
}
智能推荐
使用UmcFramework和unimrcpclient.xml连接多个SIP设置的配置指南及C代码示例
在多媒体通信领域,MRCP(Media Resource Control Protocol)协议被广泛用于控制语音识别和合成等媒体资源。UniMRCP是一个开源的MRCP实现,提供了客户端和服务端的库。UmcFramework是一个基于UniMRCP客户端库的示例应用程序框架,它帮助开发者快速集成和测试MRCP客户端功能。本文将详细介绍如何使用UmcFramework和unimrcpclient.xml配置文件连接到多个SIP设置,以及如何用C代码进行示例说明。
java.net.ProtocolException: Server redirected too many times (20)-程序员宅基地
文章浏览阅读3k次。报错:java.net.ProtocolException: Server redirected too many times (20)1.没有检查到cookie,一直循环重定向。解决:CookieHandler.setDefault(new CookieManager(null, CookiePolicy.ACCEPT_ALL));URL url = new URL(url); ..._java.net.protocolexception: server redirected too many times (20)
springboot启动报错 Failed to scan *****/derbyLocale_ja_JP.jar from classloader hierarchy_failed to scan from classloader hierarchy-程序员宅基地
文章浏览阅读4.1k次。问题这是部分报错信息2019-07-11 14:03:34.283 WARN [restartedMain][DirectJDKLog.java:175] - Failed to scan [file:/D:/repo/org/apache/derby/derby/10.14.2.0/derbyLocale_ja_JP.jar] from classloader hierarchyjava...._failed to scan from classloader hierarchy
MATLAB-ones函数_matlab中ones函数-程序员宅基地
文章浏览阅读2.8k次,点赞3次,收藏7次。在MATLAB中,ones函数用于创建一个指定大小的由1组成的矩阵或数组。_matlab中ones函数
解决PS等软件出现应用程序无法正常启动(0xc000007b)_photoshop应用程序无法正常启动0xc000007b。请单击“确认”关闭应用程序。-程序员宅基地
文章浏览阅读3.9w次,点赞2次,收藏9次。 在使用电脑办公过程中,安装应用程序时难免遇到无法安装或者无法正常启动的问题,这对我们使用电脑带来了诸多不便。那遇到应用程序无法正常启动的问题要如何解决呢?相信大家肯定都是十分疑问的,每次都是只能忍痛重新安装软件。今天,小编就和大家探讨下应用程序无法正常启动的解决方法,帮助大家排忧解难。0xc000007b电脑图解1 第一种方案:SFC检查系统完整性来尝试修复丢失文件 1、打开电脑搜索输入cmd.exe,选择以管理员身份运行,跳出提示框时选择继续。0xc000007b电脑图解2_photoshop应用程序无法正常启动0xc000007b。请单击“确认”关闭应用程序。
oracle介质恢复和实例恢复的异同-程序员宅基地
文章浏览阅读396次。1、概念 REDO LOG是Oracle为确保已经提交的事务不会丢失而建立的一个机制。实际上REDO LOG的存在是为两种场景准备的:实例恢复(INSTANCE RECOVERY);介质恢复(MEDIA RECOVERY)。 实例恢复的目的是在数据库发生故障时,确保BUFFER CACHE中的数据不会丢失,不会造成数据库的..._oracle 实例恢复和介质恢复
随便推点
轻松搭建CAS 5.x系列(5)-增加密码找回和密码修改功能-程序员宅基地
文章浏览阅读418次。概述说明CAS内置了密码找回和密码修改的功能; 密码找回功能是,系统会吧密码重置的连接通过邮件或短信方式发送给用户,用户点击链接后就可以重置密码,cas还支持预留密码重置的问题,只有回答对了,才可以重置密码;系统可配置密码重置后,是否自动登录; 密码修改功能是,用户登录后输入新密码即可完成密码修改。安装步骤`1. 首先,搭建好cas sso server您需要按..._修改cas默认用户密码
springcloud(七) feign + Hystrix 整合 、-程序员宅基地
文章浏览阅读141次。之前几章演示的熔断,降级 都是 RestTemplate + Ribbon 和RestTemplate + Hystrix ,但是在实际开发并不是这样,实际开发中都是 Feign 远程接口调用。Feign + Hystrix 演示: eruka(略)order 服务工程: pom.xml<?xml version="1.0" encoding="U..._this is order 服务工程
YOLOv7如何提高目标检测的速度和精度,基于优化算法提高目标检测速度-程序员宅基地
文章浏览阅读3.4k次,点赞35次,收藏43次。学习率是影响目标检测精度和速度的重要因素之一。合适的学习率调度策略可以加速模型的收敛和提高模型的精度。在YOLOv7算法中,可以使用基于余弦函数的学习率调度策略(Cosine Annealing Learning Rate Schedule)来调整学习率。
linux中进程退出函数:exit()和_exit()的区别_linux结束进程可以用哪些函数,它们之间有何区别?-程序员宅基地
文章浏览阅读4k次,点赞4次,收藏9次。 linux中进程退出函数:exit()和_exit()的区别(1)_exit()执行后立即返回给内核,而exit()要先执行一些清除操作,然后将控制权交给内核。(2)调用_exit函数时,其会关闭进程所有的文件描述符,清理内存以及其他一些内核清理函数,但不会刷新流(stdin, stdout, stderr ...). exit函数是在_exit..._linux结束进程可以用哪些函数,它们之间有何区别?
sqlserver55555_sqlserver把小数点后面多余的0去掉-程序员宅基地
文章浏览阅读134次。select 5000/10000.0 --想变成0.5select 5500/10000.0 --想变成0.55select 5550/10000.0 --想变成0.555select 5555/10000.0 --想变成0.5555其结果分别为:0.5000000 0.5500000 0.5550000 0.5555000一、如果想去掉数字5后面多余的0 ,需要转化一下:selec..._sql server 去小数 0
Angular6 和 RXJS6 的一些改动_angular6,requestoptions改成了什么-程序员宅基地
文章浏览阅读3.1k次。例一:import { Injectable } from '@angular/core';import { Observable } from 'rxjs';import { User } from "./model/User";import { map } from 'rxjs/operators';import { Http, Response, Headers, RequestOp..._angular6,requestoptions改成了什么