卷积中的attention map理解及可视化-程序员宅基地
技术标签: 网络架构
引用
Woo S , Park J , Lee J Y , et al. CBAM: Convolutional Block Attention Module[J]. 2018.
下载
https://arxiv.org/pdf/1807.06521.pdf
转载于:
https://www.jianshu.com/p/4fac94eaca91
https://blog.csdn.net/weixin_36541072/article/details/79126225摘要
论文提出了Convolutional Block Attention Module(CBAM),这是一种为卷积神将网络设计的,简单有效的注意力模块(Attention Module)。对于卷积神经网络生成的feature map,CBAM从通道和空间两个维度计算feature map的attention map,然后将attention map与输入的feature map相乘来进行特征的自适应学习。CBAM是一个轻量的通用模块,可以将其融入到各种卷积神经网络中进行端到端的训练。
主要思想
对于一个中间层的feature map:,CBAM将会顺序推理出1维的channel attention map
以及2维的spatial attention map
,整个过程如下所示:
其中为element-wise multiplication,首先将channel attention map与输入的feature map相乘得到
,之后计算
的spatial attention map,并将两者相乘得到最终的输出
。下图为CBAM的示意图:

CBAM的结构图
Channel attention module
feature map 的每个channel都被视为一个feature detector,channel attention主要关注于输入图片中什么(what)是有意义的。为了高效地计算channel attention,论文使用最大池化和平均池化对feature map在空间维度上进行压缩,得到两个不同的空间背景描述:和
。使用由MLP组成的共享网络对这两个不同的空间背景描述进行计算得到channel attention map:
。计算过程如下:
其中,
,
后使用了Relu作为激活函数。
Spatial attention module.
与channel attention不同,spatial attention主要关注于位置信息(where)。为了计算spatial attention,论文首先在channel的维度上使用最大池化和平均池化得到两个不同的特征描述和
,然后使用concatenation将两个特征描述合并,并使用卷积操作生成spatial attention map
。计算过程如下:
其中,表示7*7的卷积层
下图为channel attention和spatial attention的示意图:

(上)channel attention module;(下)spatial attention module
简单了说:通过深度学习的方法,自动判defect类型。并画出attention map。找到其中的defect位置,就可以不用Rcnn等方法去标记bbox。

代码实现tensorflow 1.9
"""
@Time : 2018/10/19
@Author : Li YongHong
@Email : [email protected]
@File : test.py
"""
import tensorflow as tf
import numpy as np
slim = tf.contrib.slim
def combined_static_and_dynamic_shape(tensor):
"""Returns a list containing static and dynamic values for the dimensions.
Returns a list of static and dynamic values for shape dimensions. This is
useful to preserve static shapes when available in reshape operation.
Args:
tensor: A tensor of any type.
Returns:
A list of size tensor.shape.ndims containing integers or a scalar tensor.
"""
static_tensor_shape = tensor.shape.as_list()
dynamic_tensor_shape = tf.shape(tensor)
combined_shape = []
for index, dim in enumerate(static_tensor_shape):
if dim is not None:
combined_shape.append(dim)
else:
combined_shape.append(dynamic_tensor_shape[index])
return combined_shape
def convolutional_block_attention_module(feature_map, index, inner_units_ratio=0.5):
"""
CBAM: convolution block attention module, which is described in "CBAM: Convolutional Block Attention Module"
Architecture : "https://arxiv.org/pdf/1807.06521.pdf"
If you want to use this module, just plug this module into your network
:param feature_map : input feature map
:param index : the index of convolution block attention module
:param inner_units_ratio: output units number of fully connected layer: inner_units_ratio*feature_map_channel
:return:feature map with channel and spatial attention
"""
with tf.variable_scope("cbam_%s" % (index)):
feature_map_shape = combined_static_and_dynamic_shape(feature_map)
# channel attention
channel_avg_weights = tf.nn.avg_pool(
value=feature_map,
ksize=[1, feature_map_shape[1], feature_map_shape[2], 1],
strides=[1, 1, 1, 1],
padding='VALID'
)
channel_max_weights = tf.nn.max_pool(
value=feature_map,
ksize=[1, feature_map_shape[1], feature_map_shape[2], 1],
strides=[1, 1, 1, 1],
padding='VALID'
)
channel_avg_reshape = tf.reshape(channel_avg_weights,
[feature_map_shape[0], 1, feature_map_shape[3]])
channel_max_reshape = tf.reshape(channel_max_weights,
[feature_map_shape[0], 1, feature_map_shape[3]])
channel_w_reshape = tf.concat([channel_avg_reshape, channel_max_reshape], axis=1)
fc_1 = tf.layers.dense(
inputs=channel_w_reshape,
units=feature_map_shape[3] * inner_units_ratio,
name="fc_1",
activation=tf.nn.relu
)
fc_2 = tf.layers.dense(
inputs=fc_1,
units=feature_map_shape[3],
name="fc_2",
activation=None
)
channel_attention = tf.reduce_sum(fc_2, axis=1, name="channel_attention_sum")
channel_attention = tf.nn.sigmoid(channel_attention, name="channel_attention_sum_sigmoid")
channel_attention = tf.reshape(channel_attention, shape=[feature_map_shape[0], 1, 1, feature_map_shape[3]])
feature_map_with_channel_attention = tf.multiply(feature_map, channel_attention)
# spatial attention
channel_wise_avg_pooling = tf.reduce_mean(feature_map_with_channel_attention, axis=3)
channel_wise_max_pooling = tf.reduce_max(feature_map_with_channel_attention, axis=3)
channel_wise_avg_pooling = tf.reshape(channel_wise_avg_pooling,
shape=[feature_map_shape[0], feature_map_shape[1], feature_map_shape[2],
1])
channel_wise_max_pooling = tf.reshape(channel_wise_max_pooling,
shape=[feature_map_shape[0], feature_map_shape[1], feature_map_shape[2],
1])
channel_wise_pooling = tf.concat([channel_wise_avg_pooling, channel_wise_max_pooling], axis=3)
spatial_attention = slim.conv2d(
channel_wise_pooling,
1,
[7, 7],
padding='SAME',
activation_fn=tf.nn.sigmoid,
scope="spatial_attention_conv"
)
feature_map_with_attention = tf.multiply(feature_map_with_channel_attention, spatial_attention)
return feature_map_with_attention
#example
feature_map = tf.constant(np.random.rand(2,8,8,32), dtype=tf.float16)
feature_map_with_attention = convolutional_block_attention_module(feature_map, 1)
with tf.Session() as sess:
init = tf.global_variables_initializer()
sess.run(init)
result = sess.run(feature_map_with_attention)
print(result.shape)kears的map
https://github.com/datalogue/keras-attention/blob/master/visualize.py
attention map可视化
下面开始抄另一个人的
1. 卷积知识补充
为了后面方便讲解代码,这里先对卷积的部分知识进行一下简介。关于卷积核如何在图像的一个通道上进行滑动计算,网上有诸多资料,相信对卷积神经网络有一定了解的读者都应该比较清楚,本文就不再赘述。这里主要介绍一组卷积核如何在一幅图像上计算得到一组feature map。
以从原始图像经过第一个卷积层得到第一组feature map为例(从得到的feature map到再之后的feature map也是同理),假设第一组feature map共有64个,那么可以把这组feature map也看作一幅图像,只不过它的通道数是64, 而一般意义上的图像是RGB3个通道。为了得到这第一组feature map,我们需要64个卷积核,每个卷积核是一个k x k x 3的矩阵,其中k是卷积核的大小(假设是正方形卷积核),3就对应着输入图像的通道数。下面我以一个简单粗糙的图示来展示一下图像经过一个卷积核的卷积得到一个feature map的过程。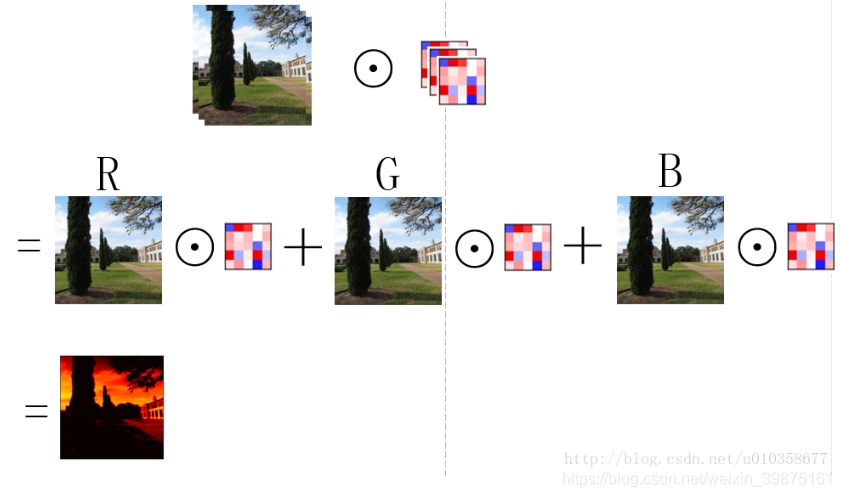
如图所示,其实可以看做卷积核的每一通道(不太准确,将就一下)和图像的每一通道对应进行卷积操作,然后再逐位置相加,便得到了一个feature map。
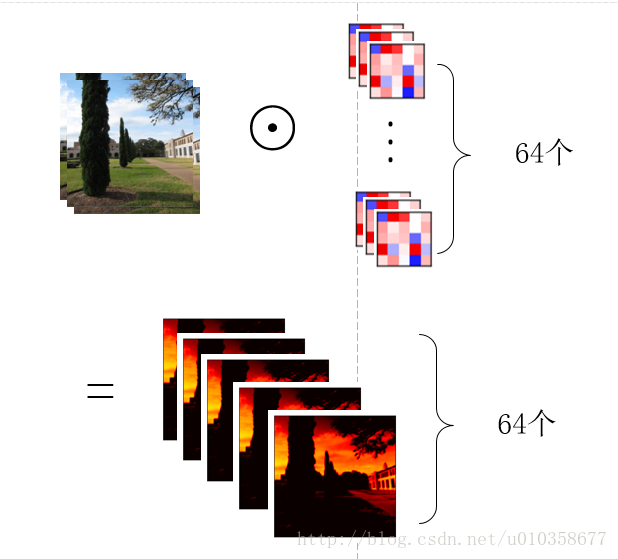
那么用一组(64个)卷积核去卷积一幅图像,得到64个feature map就如下图所示,也就是每个卷积核得到一个feature map,64个卷积核就得到64个feature map。
另外,也可以稍微换一个角度看待这个问题,那就是先让图片的某一通道分别与64个卷积核的对应通道做卷积,得到64个feature map的中间结果,之后3个通道对应的中间结果再相加,得到最终的feature map,如下图所示:
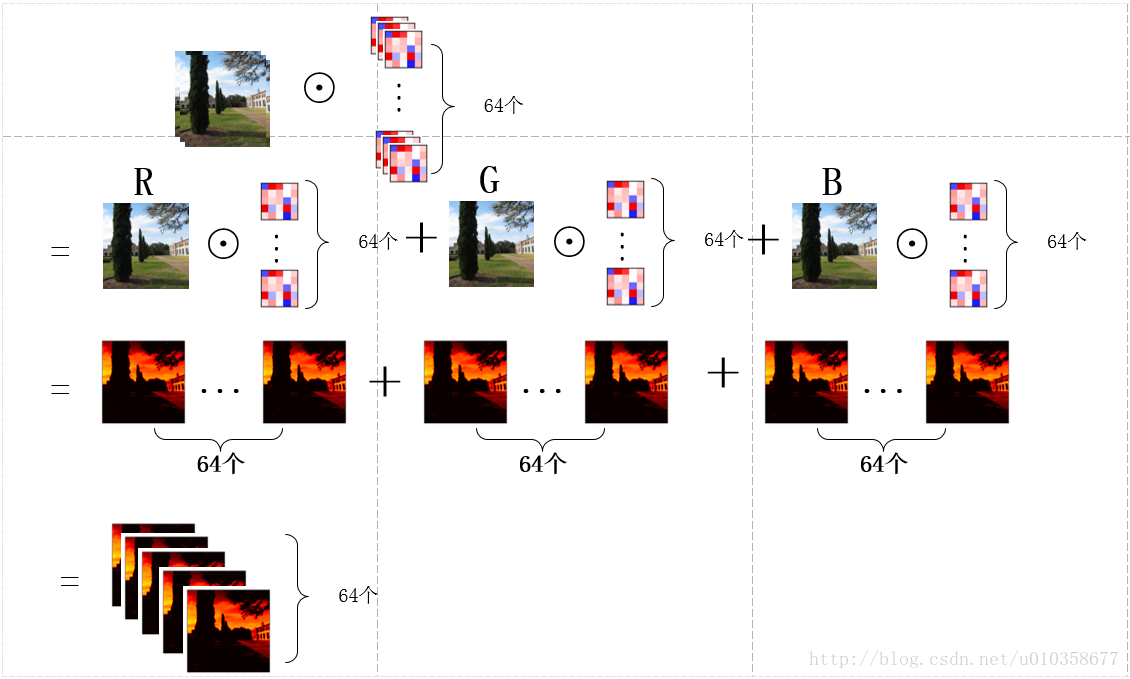
可以看到这其实就是第一幅图扩展到多卷积核的情形,图画得较为粗糙,有些中间结果和最终结果直接用了一样的子图,理解时请稍微注意一下。下面代码中对卷积核进行展示的时候使用的就是这种方式,即对应着输入图像逐通道的去显示卷积核的对应通道,而不是每次显示一个卷积核的所有通道,可能解释的有点绕,需要注意一下。通过下面这个小图也许更好理解。
智能推荐
2024最新计算机毕业设计选题大全-程序员宅基地
文章浏览阅读1.6k次,点赞12次,收藏7次。大家好!大四的同学们毕业设计即将开始了,你们做好准备了吗?学长给大家精心整理了最新的计算机毕业设计选题,希望能为你们提供帮助。如果在选题过程中有任何疑问,都可以随时问我,我会尽力帮助大家。在选择毕业设计选题时,有几个要点需要考虑。首先,选题应与计算机专业密切相关,并且符合当前行业的发展趋势。选择与专业紧密结合的选题,可以使你们更好地运用所学知识,并为未来的职业发展奠定基础。要考虑选题的实际可行性和创新性。选题应具备一定的实践意义和应用前景,能够解决实际问题或改善现有技术。
dcn网络与公网_电信运营商DCN网络的演变与规划方法(The evolution and plan method of DCN)...-程序员宅基地
文章浏览阅读3.4k次。摘要:随着电信业务的发展和电信企业经营方式的转变,DCN网络的定位发生了重大的演变。本文基于这种变化,重点讨论DCN网络的规划方法和运维管理方法。Digest: With the development oftelecommunication bussiness and the change of management of telecomcarrier , DCN’s role will cha..._电信dcn
动手深度学习矩阵求导_向量变元是什么-程序员宅基地
文章浏览阅读442次。深度学习一部分矩阵求导知识的搬运总结_向量变元是什么
月薪已炒到15w?真心建议大家冲一冲数据新兴领域,人才缺口极大!-程序员宅基地
文章浏览阅读8次。近期,裁员的公司越来越多今天想和大家聊聊职场人的新出路。作为席卷全球的新概念ESG已然成为当前各个行业关注的最热风口目前,国内官方发布了一项ESG新证书含金量五颗星、中文ESG证书、完整ESG考试体系、名师主讲...而ESG又是与人力资源直接相关甚至在行业圈内成为大佬们的热门话题...当前行业下行,裁员的公司也越来越多大家还是冲一冲这个新兴领域01 ESG为什么重要?在双碳的大背景下,ESG已然成...
对比传统运营模式,为什么越拉越多的企业选择上云?_系统上云的前后对比-程序员宅基地
文章浏览阅读356次。云计算快速渗透到众多的行业,使中小企业受益于技术变革。最近微软SMB的一项研究发现,到今年年底,78%的中小企业将以某种方式使用云。企业希望投入少、收益高,来取得更大的发展机会。云计算将中小企业信息化的成本大幅降低,它们不必再建本地互联网基础设施,节省时间和资金,降低了企业经营风险。科技创新已成时代的潮流,中小企业上云是创新前提。云平台稳定、安全、便捷的IT环境,提升企业经营效率的同时,也为企业..._系统上云的前后对比
esxi网卡直通后虚拟机无网_esxi虚拟机无法联网-程序员宅基地
文章浏览阅读899次。出现选网卡的时候无法选中,这里应该是一个bug。3.保存退出,重启虚拟机即可。1.先随便选择一个网卡。2.勾先取消再重新勾选。_esxi虚拟机无法联网
随便推点
在LaTeX中使用.bib文件统一管理参考文献_egbib-程序员宅基地
文章浏览阅读913次。在LaTeX中,可在.tex文件的同一级目录下创建egbib.bib文件,所有的参考文件信息可以统一写在egbib.bib文件中,然后在.tex文件的\end{document}前加入如下几行代码:{\small\bibliographystyle{IEEEtran}\bibliography{egbib}}即可在文章中用~\cite{}宏命令便捷的插入文内引用,且文章的Reference部分会自动排序、编号。..._egbib
Unity Shader - Predefined Shader preprocessor macros 着色器预处理宏-程序员宅基地
文章浏览阅读950次。目录:Unity Shader - 知识点目录(先占位,后续持续更新)原文:Predefined Shader preprocessor macros版本:2019.1Predefined Shader preprocessor macros着色器预处理宏Unity 编译 shader programs 期间的一些预处理宏。(本篇的宏介绍随便看看就好,要想深入了解,还是直接看Unity...
大数据平台,从“治理”数据谈起-程序员宅基地
文章浏览阅读195次。本文目录:一、大数据时代还需要数据治理吗?二、如何面向用户开展大数据治理?三、面向用户的自服务大数据治理架构四、总结一、大数据时代还需要数据治理吗?数据平台发展过程中随处可见的数据问题大数据不是凭空而来,1981年第一个数据仓库诞生,到现在已经有了近40年的历史,相对数据仓库来说我还是个年轻人。而国内企业数据平台的建设大概从90年代末就开始了,从第一代架构出现到..._数据治理从0搭建
大学抢课python脚本_用彪悍的Python写了一个自动选课的脚本 | 学步园-程序员宅基地
文章浏览阅读2.2k次,点赞4次,收藏12次。高手请一笑而过。物理实验课别人已经做过3、4个了,自己一个还没做呢。不是咱不想做,而是咱不想起那么早,并且仅有的一次起得早,但是哈工大的服务器竟然超负荷,不停刷新还是不行,不禁感慨这才是真正的“万马争过独木桥“啊!服务器不给力啊……好了,废话少说。其实,我的想法很简单。写一个三重循环,不停地提交,直到所有的数据都accepted。其中最关键的是提交最后一个页面,因为提交用户名和密码后不需要再访问其..._哈尔滨工业大学抢课脚本
english_html_study english html-程序员宅基地
文章浏览阅读4.9k次。一些别人收集的英文站点 http://www.lifeinchina.cn (nice) http://www.huaren.us/ (nice) http://www.hindu.com (okay) http://www.italki.com www.talkdatalk.com (transfer)http://www.en8848.com.cn/yingyu/index._study english html
Cortex-M3双堆栈MSP和PSP_stm32 msp psp-程序员宅基地
文章浏览阅读5.5k次,点赞19次,收藏78次。什么是栈?在谈M3堆栈之前我们先回忆一下数据结构中的栈。栈是一种先进后出的数据结构(类似于枪支的弹夹,先放入的子弹最后打出,后放入的子弹先打出)。M3内核的堆栈也不例外,也是先进后出的。栈的作用?局部变量内存的开销,函数的调用都离不开栈。了解了栈的概念和基本作用后我们来看M3的双堆栈栈cortex-M3内核使用了双堆栈,即MSP和PSP,这极大的方便了OS的设计。MSP的含义是Main..._stm32 msp psp