平衡小车从原理到实践 作者:公众号:小白学移动机器人 关于内容:参考很多网上大佬的博客加上自己的理解而成,适合平衡车初学者和想要了解原理的小伙伴。 1、平衡小车控制原理 先记住一句话,直立环和速度环的结合...
”平衡小车“ 的搜索结果

平衡小车程序_自平衡小车_
标签: 自平衡小车
简单的自平衡小车,只有两个环,直立环和速度环。
本文主要为复刻b站up主开源的平衡小车以及自己的学习过程,其中加入自己踩过的坑以及以及对该项目的理解,复刻这个项目的原因一来是自己希望能够通过做点小玩具加深对stm32的理解同时获得一点成就感让自己坚持走下去...
需要用到一些基本的硬件组件,例如电机、轮子、陀螺仪、加速度计、电池等。STM32通过初始化PA8、PA11这两个引脚,复用为TIM脉冲宽度调制模式1,通过修改TIM1通道1、4的寄存器存放数值,来控制PWM的输出脉宽。...
本文只是对STM32平衡小车制作中的代码部分,不涉及原理,加入了我在学习代码过程遇到的困惑以及解答。后续将会写写平衡小车其他部分的博客。本人目前也在学习,如果发现疑点或错误,希望大家能帮我指出来,阿里嘎多...
前几天一直在整平衡小车,想用这个理解一下pid,并调一调带编码盘的电机。 首先谈谈我对pid算法的理解,刚开始以为平衡小车是采取的串级pid来是小车平衡,就是通过角度算出此时的pwm,在通过这个pwm去当作速度环的...

平衡小车电机死区问题、陀螺仪角度测量问题、USART利用DMA转运配置函数
平衡小车调车保姆式教程(1)硬件选型,该系列教程包括硬件选型、软件设计、保姆式调参。
PID算法控制平衡小车直立
标签: 单片机

基于stm32的平衡小车
为实现小车平衡,使其实现站立平衡行走,通过运用平衡原理,测量小车姿态角参数变化,并加入到PID算法中,通过不断调节参数,实现小车平衡行走。完成了如下指标:(1)由人手持小车为直立状态开始保持平衡,平衡时间...
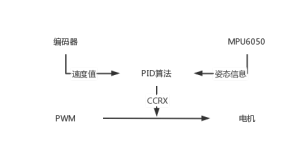
本系统为两轮自平衡小车系统,由STM32单片机控制模块,陀螺仪姿态检测模块,电机驱动模块,电源供电模块等组成。陀螺仪MPU-6050模块负责采集平衡小车的角度信号以及角速度信号,并传给单片机;STM32单片机控制模块...
代码已经整理
亚博智能 STM32平衡小车资料合集 一、平衡小车源码 STM32平衡车源码 二、平衡原理 平衡原理 三、硬件资料 1.STM32 2.MPU6050 3.蓝牙模块 4.TB6612FNG 5.LM2596S 6.GB37电机 7.超声波模块 8.平衡小车原理图 9.锂...
STM32单片机平衡小车毕业设计,包含PCB、原理图、配件清单、等等、 单片机采用:STM32F103VET6 陀螺仪:MPU6050 电机驱动:TB6612 蓝牙:HC05 等等
平衡小车之家平衡车全套资料STM32F103里面包含资料、文档、开发源码、开发视频、开发笔记等。完整版平衡小车资料以及开发过程。还有原理图、使用说明等等
模糊PID即自适应PID,通过本程序可实现对平衡车模糊PID的优化控制,针对二阶的传递函数
1.1 平衡小车直立控制调试 1.1.1 确定平衡小车的机械中值 1.1.2 确定 kp 值的极性(令 kd=0) 1.1.3 确定 kp 值的大小(令 kd=
为了满足现代智能化出行需求,提高自平衡小车控制系统的智能化水平,以STM32F103C8T6单片机作为控制核心,采用陀螺仪、加速度计和霍尔传感器分别测量小车车体的倾斜角度、加速度和速度,利用超声波测距模块检测小车与...
基于stm32两轮平衡小车源码,主要材料有3530编码电机,stm32最小系统芯片,MPU6050陀螺仪,超声波模块,电机驱动,蓝牙模块, 。
平衡车保持平衡用的是MPU6050模块,采用PID实时保持平衡。 蓝牙用的是HC-06 HC-05的蓝牙模块都可以,淘宝就有,当然HC-05主从一体的也可以; 显示屏使用0.96OLED就可以; 稳压的话可以直接淘宝买LM2595稳压就能满足...
本文提出了一种两轮自平衡小车的设计方案,采用陀螺仪ENC-03以及MEMS加速度传感器MMA7260构成小车姿态检测装置,使用卡尔曼滤波完成陀螺仪数据与加速度计数据的数据融合。系统选用飞思卡尔16位单片机MC9S12XS128为...
平衡小车的制作 带源代码电路原理图
亚博智能STM32蓝牙平衡小车代码
STM32的平衡小车,全部资料
平衡小车的PCB图,用Altium Designer打开,用来学习画PCB图的实例
matlab平衡小车,基于自抗扰控制算法的两轮自平衡车
推荐文章
- 阿里云企业邮箱的stmp服务器地址_阿里云stmp地址-程序员宅基地
- c++ 判断数学表达式有效性_高考数学大题如何"保分"?学霸教你六大绝招!...-程序员宅基地
- 处理office365登录出现服务器问题_o365登陆显示网络异常-程序员宅基地
- Nginx RTMP源码分析--ngx_rtmp_live_module源码分析之添加stream_ngx_rtmp_live_module 原理-程序员宅基地
- 基于Ansible+Python开发运维巡检工具_automation_inspector.tar.gz-程序员宅基地
- Linux Shell - if 语句和判断表达式_shell if elif-程序员宅基地
- python升序和降序排序_Python排序列表数组方法–通过示例解释升序和降序-程序员宅基地
- jenkins 构建前执行shell_Jenkins – 在构建之前执行脚本,然后让用户确认构建-程序员宅基地
- 如何完全卸载MySQL_mysql怎么卸载干净-程序员宅基地
- AndroidO Treble架构下HIDL服务查询过程_found dead hwbinder service-程序员宅基地