
”惯性导航“ 的搜索结果
基于matlabIMU导航解算,参考代码,案列实现
惯性导航技术, IMU, AHRS
INS惯性导航软件源码,供参考,捷联惯性导航
捷联惯导系统在载体导航之前需要先进行初始对准,以确定载体初始的姿态、速度和位置信息。只有获取了载体的姿态、速度、位置的初始值,并以初始值为基础通过力学编排才能计算出未来各时刻的姿态、速度和位置信息。...
需要注意的是,惯性导航系统是一个自主的、内部的导航系统,不依赖于外部信号源(如GPS),因此在长时间或无GPS信号的飞行中仍能提供导航信息。姿态更新:使用陀螺仪数据得到的姿态信息可以与其他传感器(如GPS、...
惯性导航基础知识学习----惯性器件相关
惯性导航的工作原理 ,惯性导航的目的是实现自主式导航,即不依赖外界信息,包括卫星信号、北极指引等。那么惯性是如何实现的呢? 惯性导航工作的核心原理是:它从过去自身的运动轨迹推算出自己目前的方位。其...
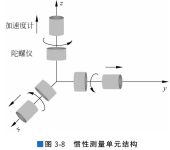
1 惯性导航系统 1.1 定义 惯性导航系统(INS )惯性导航系统是以陀螺和加速度计为敏感器件的导航参数解算系统,该系统根据陀螺的输出建立导航坐标系,根据加速度计输出解算出运载体在导航坐标系中的速度和位置。 ...
惯性导航初学者matlab仿真程序,用于初始对准。带数据和程序
惯性导航姿态解算,附带程序详解,内容完全可以直接使用
捷联式惯性导航系统解算程序 M4_InitAlign.m 惯性导航系统的初始对准 M5_1_SINS_GPS.m SINS/GPS组合导航 M5_2_SINS_GPS.m SINS/GPS组合导航(效果更佳) Utils 被主函数调用的工具类函数集合 ...
基于matlab关于惯性导航系统的使用工具箱,包括了各种函数的编写及使用说明,最重要的是先要安装此工具箱.rar
采用实测数据实现纯惯导解算,整个程序完整,包含数据,可直接使用
东南大学惯性导航期末复习资料
初学者用惯性导航matlab仿真及程序,用于综合仿真
捷联式惯性导航系统.pdf
标签: 文档资料
捷联式惯性导航系统.pdf捷联式惯性导航系统.pdf捷联式惯性导航系统.pdf捷联式惯性导航系统.pdf捷联式惯性导航系统.pdf
1、GPS融合六轴陀螺仪,解算速度,经纬度,方位角,资态。 2、无信号状态下惯性导航
惯性导航模拟程序,帮助初学者实现惯性导航模拟,绘制轨迹考虑误差项。
北航实习惯性导航相关实验.rar
标签: 实习
实验一:陀螺仪关键参数测试与分析实验、加速度计关键参数测试与分析实验 实验二:惯性测量单元安装误差系数标定实验 实验三:惯性导航综合实验 实验四:基于运动规划的惯性导航系统动态实验 实验五:惯性基组合...
初学者用惯性导航matlab仿真程序和数据,用于导航解算
北京航空航天大学《惯性导航》期末考试复习资料汇
惯性导航系统的工作原理和优势,希望对你的学习有所帮助
GPS/INS位置组合输出校正Matlab仿真 文件说明: s_GPS_INS_position_sp_demo.m 组合主文件 kalman_GPS_INS_position_sp_NFb.m 卡尔曼滤波程序 ode500.mat 飞机飞行轨迹与INS输出数据 将三个文件放到同一个文件夹中...
此demo算法参考论文Sensor fusion for robust outdoor Augmented Reality tracking on mobile devices,有多个传感器融合的例子,可将此算法结合到自己的android定位程序中。详细信息参考资源中的说明文件
惯性导航_惯性导航_
标签: 惯性导航
利用惯性导航基本方法进行惯性导航解算,得到当前时刻状态
惯性导航初始对准_万德钧房建成
惯导算法,惯性导航工具箱最新版,卡尔曼滤波
惯性导航系统MATLAB
标签: 导航系统
当前被普遍应用的惯性导航系统,虽然具有良好的自持性,但其导航误差随时间累积的固有缺陷却始终难以克服,需要采用其他的辅助导航方式进行修正。
推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地